-
좌표계를 정의해보자항법연구실/궤도역학 2026. 1. 29. 17:21
* Fundamentals of Astrodynamics and Application - Vallado 교재를 보고 학습한 내용이다.
좌표계를 정하는 가장 큰 요소 3가지는 origin(원점), fundamental plane(기준면), Principal direction(기준 방향)이다.
우주를 표현하기에 지구에서의 좌표계는 너무 작고 제한적이다. 태양계를 바라보는 거시적인 관점과 인공위성의 미션을 위한 지구를 바라보는 관점 등 다양한 관점에서 좌표계를 분류하고 사용해보자.
우선 다양한 좌표계를 3개의 큰 카테고리로 나누어보자.
행성간, 지구 기반(여기서도 지구중심, 사용자 기반으로 나뉜다.), 위성 기반의 관점으로 나누어보았다.
또한 좌표계를 실제로 구현하기 위한 Frame들에 대해 먼저 알아두고 가면 좋다.
더보기Frame
좌표계를 실제로 구현하기 위해 별이나 지구상의 점들을 이용해 만든 물리적인 틀(Frame)
관성 프레임
뉴턴의 운동 법칙을 적용하기 위해 회전하지 않는 우주의 기준점을 잡은 프레임
- ICRF(International Celestial Reference Frame)
- 원점: 태양계 질량 중심(Barycenter)
- 아주 멀리 있는 퀘이사(Quasar, Radio Source)를 기준으로 축을 고정
- 용도: 행성 간 탐사선의 궤도를 계산하는 태양계 공용 지도의 역할
- GCRF(Geocentric Celestial Reference Frame)
- 원점: 지구 중심(Earth Center)
- ICRF축 방향을 그대로 유지하면서 원점만 지구로 옮겨온 것으로,
ICRF라는 거대한 우주 관성계를 지구로 옮겼다고 이해할 수 있다. - 용도: 지구 주변을 도는 인공위성의 궤도 계산 시 가장 표준이 되는 관성계
회전 프레임
지구와 함께 빙글빙글 도는(자전,공전 반영) 우리가 서 있는 지구의 땅을 기준으로 만든 프레임
- ITRF(International Terrestrial Reference Frame)
- 원점: 지구 중심
- 특징: 지구상의 수백 개 관측소 위치를 정밀하게 측정하여 만든 지구 고정(Body-Fixed)프레임
- 용도: GPS좌표(위,경도), 지각 변동 관측과 위성 안테나의 지상 위치를 정의할 때 사용
** 헷갈리는 내용 정리
1. 프레임은 시스템의 실체
ECEF와 ITRF의 관계를 정의하기 위해 System과 Frame의 관계를 알아보아야한다. ECEF(Earth-Centered, Earth-Fixed)는 시스템의 이름이고 이를 가장 정밀하게 구현한 프레임이 바로 ITRF이다. 이 ITRF는 ECEF시스템을 구현한 국제 표준으로 GPS에서 쓰는 좌표인 WGS84프레임 위에서 정의된 값과 매우 유사하다.
마찬가지로 ECI(Earth Centered Inertial)라는 시스템은 GCRF로 구현되었다.
Interplanetary systems
가장 큰 규모의 시스템으로 태양계 전체의 역학을 다룬다.
Heliocentric System
태양계의 모든 행성을 포함하는 시스템
origin Symbol Fundamental Plane Principal Direction Example Use Sun 
Ecliptic(황도) Vernal equinox (춘분점) Patched conic 
출처: Fundamentals of Astrodynamics and Application 23.5˚의 기울기를 가진 황도를 기준면으로 삼는 이유는 관측의 편의성 때문이다.
황도를 바닥으로 정해두면 다른 행성들의 위치도 경사를 살짝 고려해서 쉽게 표현가능하다.
Solar system
1998년 IAU(국제 천문 연맹)에서 채택한 기준 좌표계로 ICRF를 기준으로한다.
origin Symbol Fundamental Plane Principal Direction Example Use Barycenter 
varies(barycenter) varies(parent's) Planetary motion Solar System은 어떤 천체를 분석하느냐에 따라 원점, 기준면을 선택할 수 있다.
이때 기준이 되는 부모는 ICRF이다. 즉, 시스템을 어떻게 설정하든 근간이 되는 축의 방향(J2000등)은 ICRF에서 정의한 절대적인 우주 좌표를 그대로 가져와서 사용한다는 뜻이다.
ICRF는 VLBI(radio source, 멀리 있는 전파원)을 기준으로 삼아 우주 공간에서 축이 고정된 Fixed 관성계를 구현한다.
ICRF 정의
- 실현 방법(Realization): 3,414개의 은하 밖 전파원을 VLBI(초장기선 간섭계)측정으로 관측하여 프레임을 구축한다.
- 고정된 축(Fixed Axes): 주기적인 재평가(ICRF1, ICRF Ext1 등)를 거치더라도 이전 버전으로부터 회전(rotation)을 도입하지 않는다.
→ 고정된 축을 가지고 있으므로 수치 연산에 유리하다 !
- 상대성 이론 프레임워크: 일반 상대성 이론의 틀 안에서 응용될 수 있도록 설계된 BCRS(태양계 중심) 및 GCRS(지구 중심) 시스템의 일부로 사용
Earth-based systems
인공위성 운영과 지상 관측의 핵심이 되는 시스템들이다.
origin: Earth
Geocentric Equatorial Coordinate System (ECI)
지구 적도면과 춘분점(J2000.0 epoch)을 기준으로 뉴턴 역학을 적용하기 위한 관성계
origin Symbol Fundamental Plane Principal Direction Example Use Earth 
Earth equator Vernal equinox General 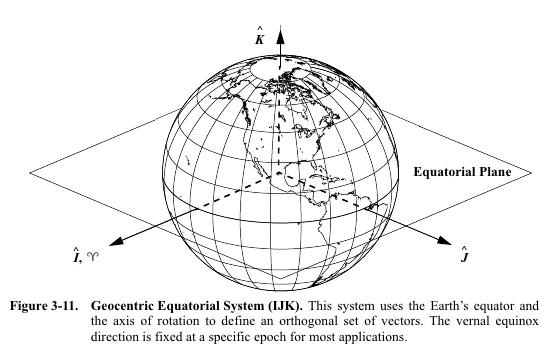
교재에서 이 시스템을 Pseudo-Newtonian이라고 표현한다.
Pseudo(가짜/유사)라고 부르는 이유는 완벽하게 고정된 지도가 아닌
특정 시점(Epoch, J2000)의 이론 모델을 빌려와서 관성계인 것처럼 사용하기 때문이다.
더보기IJK관성계와 관련하여 IAU, FK5등 다양한 용어가 나오는데 하나씩 뜯어보자
IAU: International Astronomical Union, 우주에 관한 모든 이름과 기준을 정하는 연맹
76/80 : 각각 1976년(세차모델)과 1980년(장동 모델)에 정립된 이론을 바탕으로 한다는 뜻
FK5(Fundamental Katalog 5): 별들의 위치를 기록한 5번째 표준 카탈로그를 기준으로 좌표축을 세웠다는 의미
J2000: 2000년 1월 1일 정오를 기준으로 고정된 지도를 사용.(epoch)
IAU-76/FK5 시스템은 지구의 세차(1976)및 장동(1980)운동을 정밀하게 반영하여 서로 다른 시점의 관측 데이터를 하나의 표준 관성 프레임으로 변환할 수 있게 한다. 그리고 저자는 이 표준 시스템을 ECI로 명명하여 사용한다.
2000년 1월 1일 정오라는 특정 시점의 우주 모습을 고정해두고 그 지도를 기준으로 계산한다.
그런데 만약 2026년인 지금 데이터를 처리해야한다면 J2000지도와 현재 시점 사이의 세차, 장동 변화를 수학적 모델(IAU-76 등)로 정밀하게 보정해서 다시 관성계처럼 만든다.
Earth(GCRF)
ICRF라는 거대한 우주 관성계를 지구 중심으로 옮긴 좌표계
origin Symbol Fundamental Plane Principal Direction Example Use Earth 
varies varies Perturbations 지구를 위한 표준 관성 좌표계인 GCRF는 ICRF의 counterpart이다.
GCRF는 이전 IAU 시스템들과의 연속성을 제공하기 위해 IAU-76/FK5프레임과 밀접하게 정렬되어 있다.
1997년 당시에는 ICRF와 호환되는 공식 장동(Nutation) 이론이 없었기 때문에 IERS는 이를 GCRF와 연결하기 위해 IAU-76/FK5 이론에 대한 표 형태의 보정값들을 유지하고 있다.
이러한 보정값들을 적용하는 것은 IAU-76/FK5보다 더 정확하지만 다른 관습적 이론을 실질적으로 정의하게된다.
어려운 내용인데 한마디로 표현하자면 GCRF는 우주에 축이 고정된 가장 정밀한 지구용 관성 지도이기 때문에 위성이 받는 미세한 힘(Perturbation, 섭동)을 관찰하기에 최적화되어있다.
Body-fixed (ITRF/ECEF)
지구 지표면을 기준으로 지구와 함께 회전하는 좌표계
origin Symbol Fundamental Plane Principal Direction Example Use Earth 
Earth equator Greenwich meridian Observation IJK는 멀리 있는 별을 통해 축을 지정한 반면, 지구에 고정된 Body-Fixed 좌표계는 우리가 서 있는 땅을 기준으로 축을 지정한다.
ITRF - ##
지표면에 있는 여로 관측소(stations)의 좌표를 통해 축을 실현한다. 그러나 관측소들은 판 구조론에 의해 매년 약 수cm씩 이동하므로 ITRF는 여러 분석 센터의 해를 결합하여 주기적으로 재추정된다. 그렇기에 통상적으로 ITRF-08과 같이 솔루션이 발표된 연도를 붙여 식별한다.
ECEF
ITRF 시스템을 일반적인 용도로 부를 때 사용하는 명칭이다. Earth-fixed라는 용어는 지구의 지각(crust)에 대해 전체적인 방향이 시간이 지나도 변하지 않는 지구 reference system을 의미한다. 이는 기관마다 사용하는 용어가 다른데 미 공군에서는 EFG라는 단어를 사용하고 ITRF를 설명하기 위해 ECR(Earth-Centered Rotating)이라는 용어를 사용하기도 한다.
Earth-Moon(synodic)
지구와 달 사이의 복잡한 중력장을 다룰 때 유용하게 쓰이는 도구
origin Symbol Fundamental Plane Principal Direction Example Use barycenter 
Invariable plane Earth Restricted three-body 지구와 달이 서로 공전하는 속도에 맞춰 좌표계 자체가 빙글빙글 돈다.
지구와 달이 공전하는 궤도 평면인 invariable plane을 기준면으로 삼고 항상 지구를 향하도록 고정되어 있다.
지구, 달, 그리고 그 사이를 날아가는 위성 - 세 물체 사이의 중력 관계를 풀 때 필수적이다.
origin: Site
Topocentric horizon(SEZ)
관측자의 지평선을 기준으로, 위성의 방위각과 고도를 나타내는데 최적화
origin Symbol Fundamental Plane Principal Direction Example Use site 
Local horizon South Rader observation 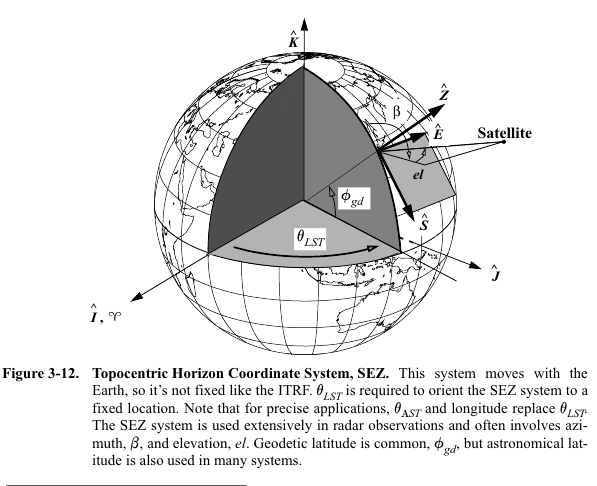
S(South): 관측소에서 정남향
E(East): 관측소에서 정동향
Z(Zenith): 관측소의 수직 방향, 지표면에서 바깥을 향함
- SEZ프레임에서는 남쪽에서 시계 반대 방향으로 측정하는 것이 자연스러울 수 있지만 관습적으로 북쪽 기준 시계 방향 측정을 많이 사용한다. 그래서 이처럼 북쪽 기준을 사용하는 고전적 정의인 NEZ(North-East-Zenith) 시스템이 있지만 이는 왼손 좌표계를 사용하여 계산이 쉽지 않다. 사용되는 기관이나 시스템에 따라 SEZ 또는 NEZ를 사용하여 방위각의 기준점이 다를 수 있으므로 이를 확인하는 것이 중요하다.
초기 궤도 결정 시 어떤 컨벤션(축의 방향 및 각도의 부호)을 사용하는지 명확히 확인하는 것이 필수적 !!
Topocentric equatorial
원점만 사용자로 옮기고 축의 방향은 관성계와 평행하게 유지하여 고성능 망원경 등에서 사용
origin Symbol Fundamental Plane Principal Direction Example Use site 
Parallel to Earth equator Vernal equinox Optical observation I: vernal equinox
K: 북극 관통
원점을 관측자로 옮겼지만 축의 방향은 지심 관성계(IJK)와 평행하게 유지되는 좌표계이다. 정밀 과학 망원경 시스템에서 사용된다.

Satellite-based systems
위성의 운동상태나 상대적인 위치를 분석하기 위해 위성을 원점으로 잡는 시스템이다.
Perifocal
궤도면 그 자체를 순수하게 설명해주는 시스템으로 궤도 요소를 처리할 때 핵심적인 역할을 함
origin Symbol Fundamental Plane Principal Direction Example Use Earth 
Satellite orbit Periapsis Processing 궤도요소를 처리하고 궤도면을 설명하기 좋은 시스템이다. 그러나 periapsis, 근일점을 기준으로 하기에 원궤도에서는 정의할 수 없다는 문제가 있다.

Satellite radial
위성 위치 벡터(R)와 궤도 평면을 기준으로 하며 상대운동이나 섭동 분석에 사용
origin Symbol Fundamental Plane Principal Direction Example Use Satellite 
Satellite orbit Radial vector Relative motion,
Perturbations상대운동(랑데부, 도킹, 편대 비행 등)이나 섭동 분석에 사용하는 시스템으로 Radial vector을 기준 방향으로 잡는다.
Radial vector은 지구에서 위성을 향하는 방향이며 이 벡터에 수직이며 위성이 이동하는 방향을 S로 정의한다.
RSW에서 이심률이 0이 아니라면(= 원궤도가 아니라면) S와 velocity 벡터는 일치하지 않는다.
R (Along-track or transverse): 위성 위치 벡터와 평행한 방향, 이 축을 따라 발생하는 위치 변화를 Radial displacement라고 함
→ Yaw (= -R)
S (Along-track / Transverse): 위치 벡터에 수직(Normal)인 방향, 이 축을 따라 발생하는 변위를 Along-track 또는 Transverse displacement라고 부름
→ Roll (=S, 원 궤도에서만 속도 벡터와 동일)
W(Cross-track): 현재의 위치 벡터와 속도 벡터가 이루는 궤도 평면에 수직인 방향, 이 축을 따라 측정되는 위치를 Cross-track position이라고 함
→ Pitch(=-h)
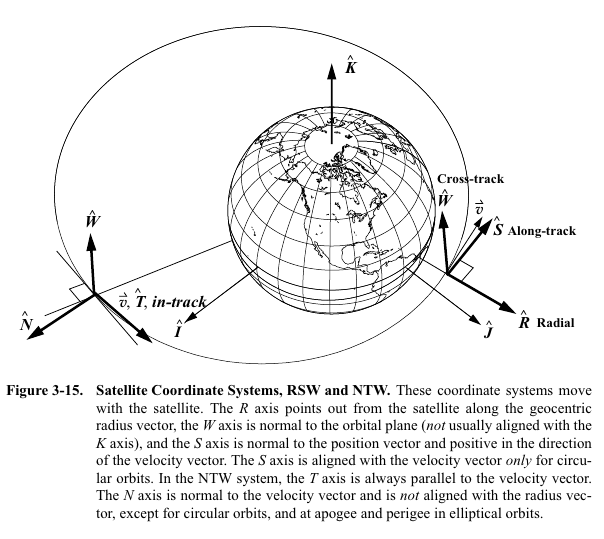
Satellite normal
속도 벡터(V)에 수직인 방향을 기준으로 섭동을 분석
origin Symbol Fundamental Plane Principal Direction Example Use Satellite 
Satellite orbit Normal to velocity vector Perturbations RSW와 유사하지만 기준이 velocity라고 생각하면 된다.
NTW시스템은 위성의 속도 벡터(v)를 기준으로 정의되는 좌표계로 모든 궤도 유형에서 유효하다.
T(Tangential/ In-track): 궤도에 접하는 방향으로 항상 속도 벡터(v)를 가리킴
N(Normal): 궤도 평면 내에 위치하며 속도 벡터에 수직인 방향
*원 궤도나 타원 궤도의 원지점(Apogee)/근지점(Perigee)을 제외하고는 반지름 벡터(R)와 일치하지 않음
W(Cross-track): RSW 시스템과 동일하게 궤도 평면에 수직인 방향
이 시스템의 주요 용도는 공기저항(darg)를 분석하는 것이다.
공기 저항은 항상 위성의 진행 방향인 속도 벡터(v)를 따라 작용한다.
NTW의 T축이 항상 속도 벡터와 일치하기 때문에 항력(Drag) 효과가 궤도에 미치는 영향을 분석하는 데 최적화되어 있다.
수학 및 물리학에서는 이 시스템을 종종 프레네(Frenet)시스템이라고도 부른다.
Equinoctial
궤도 평면을 기준으로 하고 원 궤도나 적도 궤도에서 발생하는 수학적 특이점을 제거
origin Symbol Fundamental Plane Principal Direction Example Use Satellite 
Satellite orbit Caculated vector Perturbations 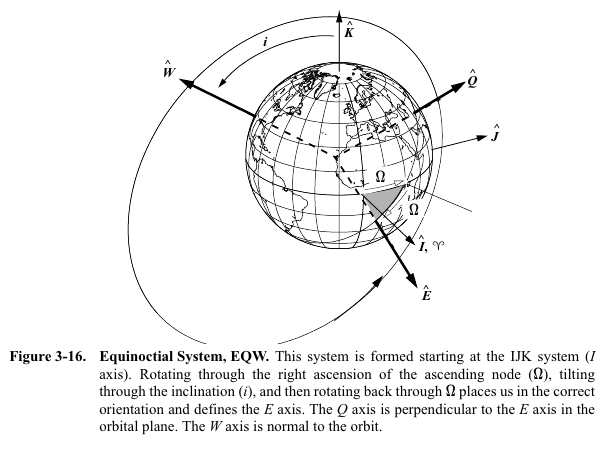
위성의 궤도 평면을 기준으로 하며 원 궤도나 적도 궤도에서 발생하는 수학적 특이점을 해결하기 위해 고안된 유용한 시스템이다.
EQW시스템은 지심 관성계(Geocetric, IJK)에서 시작하여 세번의 회전을 통해 형성된다.
E: IJK시스템의 I축(춘분점)에서 시작하여 적도를 따라 RAAN(Ω)만큼 회전하고, 궤도 경사각(i)만큼 기울인 뒤, 다시 궤도 평면 내에서 Ω만큼 반대 방향으로 회전시켜 결정한다.
Q: 궤도 평면 내에서 E축에 수직인 방향
W: 궤도 평면에 수직인 방향(Normal)으로, 각운동량 벡터와 평행
* 많은 사람이 의아해할 부분이 E축이다.
RAAN만큼 갔다가 왜 RAAN을 다시 돌아오지? 라는 생각이 들 것이다.
그런데 여기서 핵심은 회전하는 '축'이 달라진다는 점이다.
단계별 회전 과정에 대해 보자.
1. I축에서 Ω (RAAN)만큼 회전
- K축을 기준으로 I축을 Ω방향으로 돌린다.
→ 이제 기준축이 궤도의 북반구, 남반구를 가르는 Line of Nodes를 가리키게 된다.
2. 궤도 경사각(i)만큼 기울임
- 승교점 축을 회전축으로 삼아 평면을 궤도 경사각(i)만큼 들어올린다.
→ 좌표계의 바닥면이 지구 적도면이 아닌 위성의 궤도 평면과 일치
3. 궤도 평면 내에서 Ω만큼 회전
- 이미 i만큼 기울어진 새로운 궤도 평면 위에서 다시 반대 방향 (- Ω)만큼 회전한다.
→ 이 과정을 통해 EQW의 주축(E)를 결정한다.
- 일반적인 타원 궤도 요소는 경사각이 0이거나 이심률이 0일 때 수학적으로 정의되지 않는 부분이 생기는데 EQW 시스템은 이를 제거하여 모든 형태의 궤도(원, 타원, 적도 궤도)를 안정적으로 설명할 수 있게 해줌
- 섭동 분석(Perturbations): 위성이 받는 미세한 힘이 궤도에 미치는 영향을 분석하는 데 매우 효과적
- 시간에 따른 변화: 섭동 고려 시, 이 좌표계 자체도 시간이 지남에 따라 미세하게 움직이는 특성 가짐
좌표계는 궤도역학에서 굉장히 중요하다 !!
'항법연구실 > 궤도역학' 카테고리의 다른 글
[궤도역학] 궤도 결정에서 수치 적분과 해석해 (0) 2026.04.01 시간 체계에 대해서 알아보자 (0) 2026.02.09 궤도 요소 6가지 : COEs (1) 2026.01.05 궤도적분 응용 : 3차원 궤도 적분과 검증 (1) 2025.12.23 Orbit Propagation - TBP, Euler법을 활용한 기초 (0) 2025.12.22 - ICRF(International Celestial Reference Frame)