-
[칼만 필터는 어려워] 06. 칼만 필터 예측 단계항법연구실/칼만필터 2026. 3. 9. 19:55
* 칼만필터는 어렵지 않아(지은이 김성필) 책을 보고 학습한 내용을 정리한 글입니다.
칼만 필터 알고리즘 I로 돌아왔다. 앞서 추정 단계에서는 II ~ IV를 알아보았고 예측은 어떻게 하는지, 추정과 예측의 차이가 무엇인지에 대해서도 알아볼 예정이다.
예측값 계산
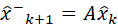
예측과정에서는 시각이 t = k에서 t = k+1로 바뀔 때 추정값이 어떻게 바뀔 지 추측하는 것이다. 현재 시각을 기준으로 다음 시각에서는 어떤 값이 될 지를 예상하는 것이 예측이다.
우리는 이미 칼만 필터 알고리즘 첫번째 단계에서 예측값 식에 대해서 배웠다.
식 1 
식 2 t = k+1시점에서의 값이라는 의미로 아래첨자 k+1을 붙이고 예측한 값이라는 표시로 위첨자 '-'를 붙였다. A,Q는 시스템 모델에서 정의되어 있으므로 식만 잘 따라가면 된다. 앞으로 시스템 모델에 대해 배우겠지만, 조금만 짚고 넘어가보자.
식2에서 핵심은 Q이다. A는 상태 전이 행렬로 현재 위치로 다음 위치를 계산하는 물리 법칙을 담고 있다. Q는 시스템 잡음 공분산으로 A에서 예측하지 못한 외부 요인의 크기를 나타낸다. 우리가 아무리 완벽하게 계산한 시스템 모델(A)가 있어도, 우리의 능력으로 예측할 수 없는 변수(바람, 마찰, 미세한 진동 등)가 항상 존재한다. 그렇기에 미래를 예측하는 순간, 이전 단계의 오차에 예측 모델의 불확실성(Q)이 더해져 전체적인 불확실성을 나타내는 오차 공분산(P)가 커지게 된다.
그럼 이제 예측을 통해 우리의 미래는 이럴 것이고, 이만큼 불확실해 ! 라는 결과를 얻었다.
그럼 추정과 예측은 어떻게 다를까?를 알아보자
예측 vs 추정
예측은 어디로 갈 지 예견하는 것이고, 추정은 내가 한 예측이 맞는 지 현실과 비교하여 확정하는 과정이라고 표현할 수 있다. 이 과정이 반복되며 필터는 잡음 속에서도 유지되는 최적의 궤적을 찾아내는 것이다.
또한 예측은 시스템 모델(수학적 법칙, A,Q이용)에 의존하는 반면, 추정은 시스템 모델 결과인 예측값에 측정값을 섞어 결론을 도출한다. 그럼 이제 칼만 필터 추정값 계산식을 예측값과의 관계를 통해 살펴보자.

식 3 추정값 계산은 앞선 추정값이 아닌 예측값을 이용하여 계산한다. 그리고 예측값은 앞선 추정값을 이용해 계산한 값이다.
식 1 변형 식1에서 시점 k+1만 한 단계 앞으로 당기면 결과를 알 수 있다. 그럼 이 예측 값을 다시 추정값 계산식에 넣어보자


식4 그럼 추정값에서 이전 추정값을 볼 수 있을 것이다. 칼만 필터는 다른 필터와 달리 추정값을 계산할 때, 직전 추정값을 바로 사용하지 않고 예측 단계를 거친 뒤 계산한다. 오차 공분산도 마찬가지이다.
그런데 여기서 주의해야할 점이 있다.식 1에서 나오는 예측 단계의 계산은 간단하지만, (A만 곱하면 되니까) 칼만 필터의 성능에는 지대한 영향을 끼친다.

식 3에서 나온 것처럼 실제 측정값과 예측한 측정값의 차이는 측정값의 예측 오차를 곱해주기 때문에 식을 해석해보면 다음과 같다. 칼만 필터는 측정값의 예측 오차로 예측값을 적절히 보정하여 최종 추정값을 계산한다 ! 추정값 계산식을 예측값의 보정 관점에서 살펴보자면 추정값을 결정하는 가장 큰 요소는 예측값의 정확성이다. 그리고 이 예측값은 시스템 모델 A, Q에 의해 계산되기 때문에 사실상 칼만 필터는 시스템 모델에 달려있다고 해도 과언이 아니다.
그럼 다음장에서 시스템 모델에 대한 내용을 다루어보겠다.
'항법연구실 > 칼만필터' 카테고리의 다른 글
위성 궤도 추정에서 칼만 필터(EKF)를 쓰는 이유 (0) 2026.04.06 [칼만 필터는 어려워] 07. 칼만 필터 시스템 모델 (0) 2026.03.10 [칼만 필터는 어려워] 05. 칼만 필터 추정 단계 (0) 2026.03.09 [칼만 필터는 어려워] 04. 칼만 필터 (0) 2026.03.07 [칼만 필터는 어려워] 03. 저주파 통과 필터 (0) 2026.03.06