-
[칼만 필터는 어려워] 03. 저주파 통과 필터항법연구실/칼만필터 2026. 3. 6. 17:29
* 칼만필터는 어렵지 않아(지은이 김성필) 책을 보고 학습한 내용을 정리한 글입니다.
저주파 통과 필터
저주파 신호는 통과시키고 고주파 신호는 걸러내는 역할의 필터
대부분 측정하려는 신호는 저주파인 반면 잡음은 고주파 성분으로 구성되어있기 때문에 잡음 제거용으로 많이 사용된다.'저주파 통과 필터'라는 뜻은 저주파만 통과 시키는 특성을 가지고 있는 모든 필터를 칭하는 하나의 카테고리 같은 말이다. '전화기'같은 개념인데, 전화기라는 카테고리 내에서는 스마트폰, 다이얼/버튼식 전화기 등 다양한 전화기가 있다. 본 교재에서는 가장 간단한 1차 저주파 통과 필터를 다룬다.
저주파 통과 필터를 들여다보기 전, 이동 평균 필터의 한계에 대해 다시 짚고 넘어가자
앞서 배웠던 이동평균 필터에는 한계가 있다.

이동평균 필터를 쪼개어보면 다음과 같은 수식으로 표현할 수 있다.

어떤 문제점인가에 대한 정답은 바로 '가중치'이다. 이동 평균 필터에는 모든 값에 (1/n)이라는 동일한 가중치가 적용되고 있다.
이게 어떤 문제가 있는가,, 하면 측정값의 변화가 클수록 시간지연이 커지는 것도 문제점 중 하나이다. 오래된 측정값과 최신 측정값을 같은 비중으로 취급하기 때문에 시간 지연이 발생하고 변화 민감성 또한 떨어지는 것이다.
1차 저주파 통과 필터 = 지수 가중 이동평균 필터
이동 평균 필터는 오래된 측정값, 최신 측정값을 같은 비중으로 취급하여 문제가 발생했다. 그럼 오래된 값은 적게, 최신 값은 가중치를 크게 주어보자 ! 그럼 임의의 변수 α를 정하고 다음과 같이 표현할 수 있다.

식 1 
어? 그런데 이 식, 낯설지 않다. 1장에서 배웠던 평균 필터와 똑같은 식이다. 물론 평균 필터에서 α는 k-1/k라는 상수로 고정되어 있으며 k가 커질수록 이 α값도 1에 가까워진다는 점이 다르다. 평균 필터에서 x̅값은 평균이었지만, 1차 저주파 통과 필터에서 x̅는 평균과 전혀 상관이 없다. 그러니 앞으로 추정값이라는 말을 대신 사용하겠다.
그럼 저주파 통과 필터의 식을 뜯어보자, 평균 필터와 어떻게 다른지, 그리고 가중치가 어떻게 부여되는지 위주로 보면서 학습한다.

식 2 직전 추정값 식을 나타내면 식 2와 같다. 식 1에 식 2를 대입하여 계산하면 다음과 같은 관계식이 유도된다.



식 3 k번째, k-1번째, k-2번째에 곱해진 식을 비교하면 어느 데이터에 가중치가 많이 부여되어 있는지를 알 수 있다. α가 0과 1사이의 값이므로 α(1- α)와 (1-α) 계수의 관계식을 구할 수 있다.

그럼 이전 값도 동일할까? 이번엔 k-3번째 변수까지 올라가보자.



식 4 α의 지수가 분명하게 보이기 시작한다. α는 0과 1사이의 상수이므로 α의 지수가 커질수록 그 값은 매우 작아진다.(지수 함수를 생각하면 편하다.)

해당 부등식까지 비교하면 이전 측정치에 곱해지는 가중치가 작아진다는 사실을 알 수 있다. 오래된 데이터일수록 지수가 커져 기하급수적으로 가중치를 낮게 부여해서 이동 평균을 계산하는 특성에 기인하여 이 필터를 지수 가중 이동평균 필터라고도 부른다.
여기서 1차 저주파 통과 필터(LPF)가 모든 과거 데이터를 품고 있으면서도 동적인 변화를 따라갈 수 있는 이유를 찾을 수 있다. 오래된 데이터는 수학적으로 식에 포함되어 있지만 영향력이 지수적으로 작아져서 사실상 현재의 평균에 거의 영향을 주지 못한다.
저주파 통과 필터 함수 예제
측정 데이터를 받아 추정값을 반환하는 1차 저주파 통과 필터 함수(LPF)를 구현하고 이를 실행해본다.
2장에서 사용했던 초음파 거리계 예시를 동일하게 사용한다.
저주파 통과 필터 함수는 α값에 의해 잡음 제거 성능과 민감도가 변한다. 그래서 α값을 변화시켜보았을 때 그래프를 그려보았다.
빨간 점은 실제 측정치이고, 파란선이 LPF값이다 .
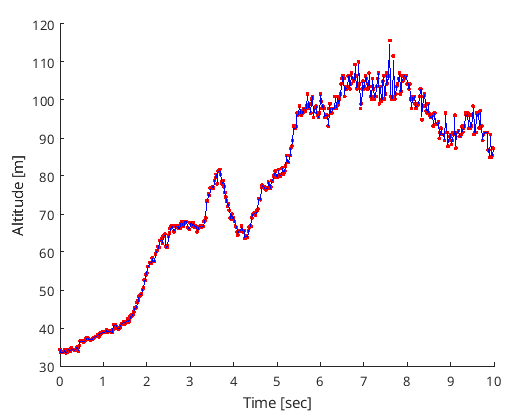
α = 0.1 
α = 0.5 
α = 0.7 
α = 0.8 α와 그래프의 상관관계를 분석하기 위해 식을 다시 끌고 왔다.
α가 작으면 1- α값이 상대적으로 더 커진다. 그럼 추정값 계산에 현재 측정값이 더 많이 반영된다는 것을 의미한다. 현재 측정값의 비율이 클수록 필터는 변화에 민감해지며 잡음이 많이 발생한다. 위 그래프에서 볼 수 있듯, α = 0.1일때 LPF그래프가 급격히 변하는 것을 확인할 수 있다.
반면, α가 크면 1- α값이 상대적으로 작아진다. 즉 추정값 계산에 현재 측정값이 반영되는 비율이 줄어든다. 현재 측정값의 비율이 작아지므로 필터는 변화에 무뎌지지만 잡음 제거 특성이 탁월해진다. 그래서 α가 커질수록 LPF그래프는 변화에 무뎌지고 잡음이 줄어드는 것이다.
평균필터 vs 이동평균 필터 vs 1차 저주파 통과 필터
이제 3종류의 재귀 필터를 살펴보았고 앞으로 칼만 필터에 대해 학습해본다. 재귀필터를 배울 때, 잊지 말아야 할 내용을 정리해본다.
- 실시간 데이터 처리를 위해 필터는 재귀식으로 표현
- 평균 필터: k개 데이터의 평균 (k의 크기에 따라 변화)
- 이동평균 필터 수식: n개 데이터의 평균, 시간의 흐름에 따른 변화를 반영 (n의 크기에 따라 변화)
- 1차 저추파 통과 필터 수식: 최신 데이터에 높은 가중치를 반영하여 변화 반영(α의 크기에 따라 변화)
'항법연구실 > 칼만필터' 카테고리의 다른 글
[칼만 필터는 어려워] 06. 칼만 필터 예측 단계 (0) 2026.03.09 [칼만 필터는 어려워] 05. 칼만 필터 추정 단계 (0) 2026.03.09 [칼만 필터는 어려워] 04. 칼만 필터 (0) 2026.03.07 [칼만 필터는 어려워] 02. 이동 평균 필터 (0) 2026.03.05 [칼만 필터는 어려워] 01. 평균 필터 (1) 2026.03.04