-
[칼만 필터는 어려워] 04. 칼만 필터항법연구실/칼만필터 2026. 3. 7. 23:43
* 칼만필터는 어렵지 않아(지은이 김성필) 책을 보고 학습한 내용을 정리한 글입니다.
드디어 칼만 필터의 영역으로 들어왔다. 책에서 굉장히 쉽게 설명해주고 있지만 아직 '칼만필터'를 온전히 이해하는 것은 쉽지 않다. 칼만필터를 완전히 이해하기 위해서는 선형대수, 확률, 최적화 등 상당한 수학적 지식이 있어야한다. 그러나 이 책에서는 칼만 필터를 가져다쓰기 위한 공대적 접근을 제시한다.
칼만필터에 대한 논문이 처음 발표된 1960년부터 현재까지 아주 오랜 세월동안 검증된 기법인데, 굳이굳이 그 유도를 다 해야할까?라고 제시해주셔서 굉장히 고마웠다. 칼만 필터 알고리즘을 이해하기도 전에 수식 때문에 포기하면 얼마나 아쉬울까! 어쨌든 실무에서 필요한 지식을 가지고 칼만 필터를 살펴보자!
칼만 필터 알고리즘
1차 저주파 통과 필터는 직접 추정값과 측정값으로 구성되어 간단한 다항식으로 표현할 수 있었다. 반면 칼만 필터는 여러번의 계산 과정과 예측값, 추정값, 측정값 등으로 구성되어 있으며 변수도 많고 계산도 복잡하다. 그래서 단순한 필터라기보다는 수치 알고리즘이라고 볼 수 있다.

참고: 칼만필터는 어렵지 않아(2019, 김성필) 왼쪽 그림이 바로 칼만필터 알고리즘이다. III에서 입력값 z_k를 받고 출력값 bar(x_k)을 반환한다. 결과적으로 초기값을 통해 예측값(I)을 계산하고, 예측값으로 칼만 이득을 계산한 뒤(II), 예측값과 칼만 이득으로 추정값(III), 오차 공분산(IV)을 계산하는 과정이다.
단계별로 자세히 알아보자 !
I. 추정값과 오차 공분산 예측
예측 단계에서 사용하는 A,Q는 시스템 모델에서 정의된다. 시스템 모델은 따로 자세히 작성하겠다 !! k번째 예측 단계에서는 k-1번째의 추정값을 사용하여 계산한다. (=직전 추정값과 오차 공분산이 입력되면 예측값을 반환한다. )
II. 칼만 이득 계산
칼만 이득 (K_k)을 계산하는 단계로 P_k예측값을 사용한다. H,R은 미리 정하는 값으로 알고리즘 밖에서 결정된다. 시스템 모델에서 이 변수들에 대해 다루겠다.
III. 추정값 계산
입력된 추정값으로 추정값을 계산한다. 여기서 저주파 통과 필터와의 관련성이 나온다 ! II에서 시스템 모델(A,Q)을 기초로 다음 시각에서의 상태와 오차 공분산이 어떤 값이 될 지 예측하고 이 예측값과 측값 차이를 보정해서 새로운 추정값이 계산된다. 그리고 이 추정값이 칼만 필터의 최종 결과물이다.
IV. 오차 공분산 계산
오차 공분산은 추정값이 얼마나 정확한지 알려주는 역할로, 추정값과 측정값 간의 차이인 오차가 얼마나 퍼져 있는지를 나타내는 지표이다. 해당 지표로 앞서 계산한 추정값을 쓸지, 버릴지를 결정할 수 있다.
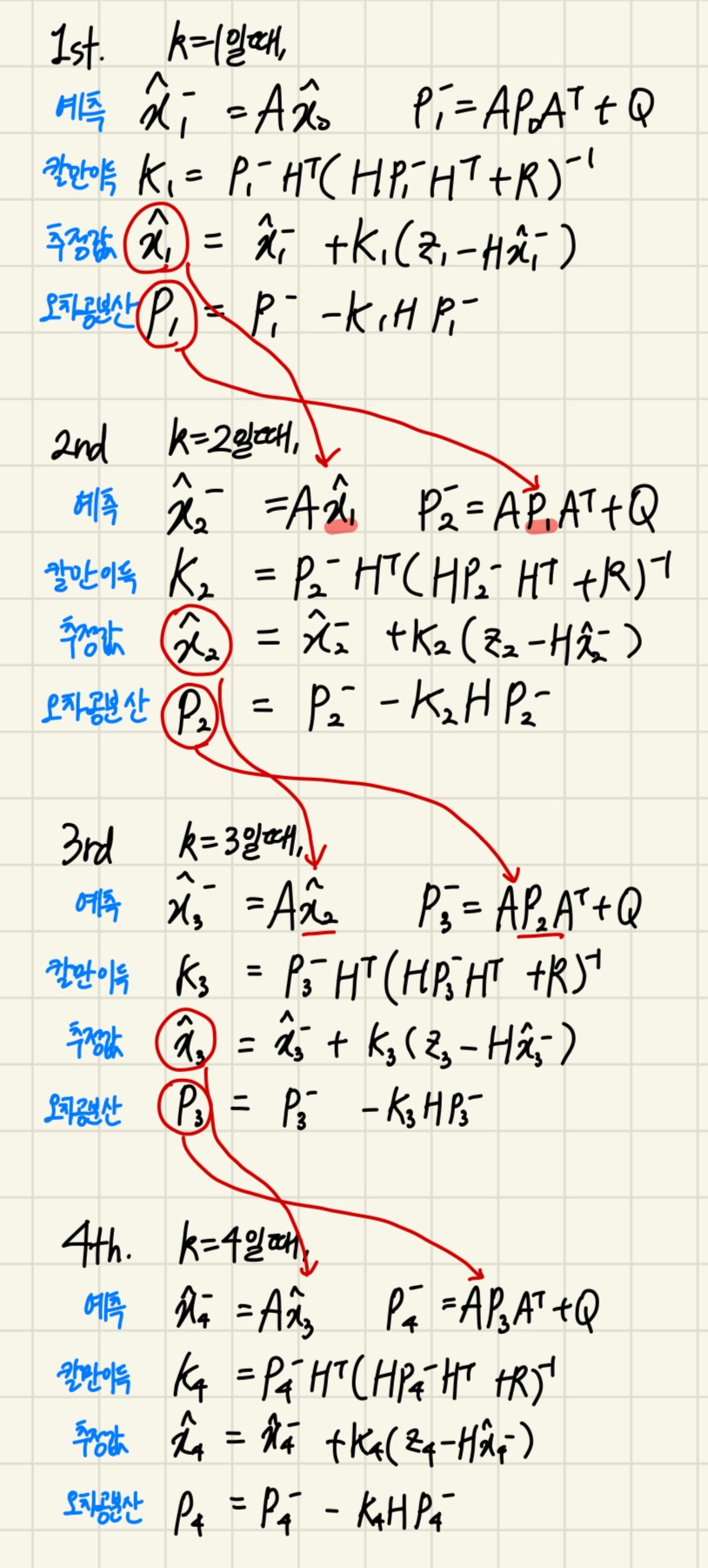
헷갈리면 여러번 써보면 된다. 이전 값의 output이 다음 값의 input으로 들어가는 재귀적 모델이므로 앞서 설명한 재귀 필터의 개념이 중요했던 이유를 알 수 있다.
앞으로 추정, 예측 과정을 더 자세히 살펴보겠다. 그리고 마지막엔 시스템 모델까지 !
사실상 추정, 예측 과정 식은 이미 정해져있고 그 값을 표현하는 변수들(즉 시스템 모델)의 역할이 굉장히 중요하다. 이 책에서는 칼만 필터의 성능은 시스템 모델에 달렸다고 해도 과언이 아닐 정도로 시스템 모델은 중요하다고 표현하고 있다.
'항법연구실 > 칼만필터' 카테고리의 다른 글
[칼만 필터는 어려워] 06. 칼만 필터 예측 단계 (0) 2026.03.09 [칼만 필터는 어려워] 05. 칼만 필터 추정 단계 (0) 2026.03.09 [칼만 필터는 어려워] 03. 저주파 통과 필터 (0) 2026.03.06 [칼만 필터는 어려워] 02. 이동 평균 필터 (0) 2026.03.05 [칼만 필터는 어려워] 01. 평균 필터 (1) 2026.03.04